Max’s journey introduces LQRax, a JAX-native LQR solver, which exemplifies the growing JAX robotics ecosystem that includes tools like Brax, MJX, and JaxSim, highlighting the benefits of JAX for computational efficiency in optimal control and simulation, and for seamlessly integrating model-based and learning-based approaches.
A roboticist’s journey with JAX: Finding efficiency in optimal control and simulation


Related Posts
10 React Mistakes You Must Avoid as a Developer 🚀
React is powerful, but even experienced developers fall into common traps that can slow performance and make debugging…
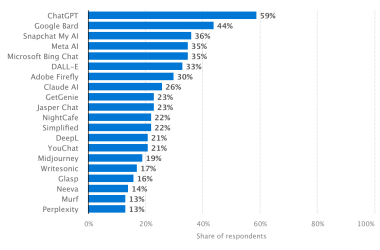
How to Fine-Tune LLM (Large Language Models) in 2025: Best Practices
In today’s AI market, you can find a variety of large language models (LLMs), coming in numerous forms…

CRUD Laravel 10 dan Bootstrap 5 #2: Menampilkan Data
Hai, Sobat Risereaders! Pada artikel sebelumnya, kita telah membahas langkah-langkah persiapan awal untuk memulai pembuatan aplikasi CRUD sederhana…